14 DAY TRIAL //
14 DAY TRIAL // For how much humans seem to fear or hate spiders, bugs and critters in general, many of our inventions take their forms to some extent or another. Hector is the latest on a long list, although an admittedly more stable example than others.
Hector isn't nearly as agile or athletic as the mythical Greek hero, but the name is more of an acronym anyway, so it gets away with it: Hexapod Cognitive Autonomously Operating Robot.
Hector is based on a combination of electromechanics and artificial intelligence research, which makes it a sort of linchpin for multi-legged robot R&D, and for robotic development in general.
While still an incomplete insect robot, it can nonetheless walk at its own discretion, more or less, thanks to an integrated ability to examine its immediate surroundings.
Hector learns how to walk
Fixed leg gaits like the tripod are commonly seen even on bots with six legs. The Hector uses all six properly though, kind of like an ant would, though they weren't what the bot was based on.
It was modeled on a stick insect and can also behave like one, making decisions about how to move through its surroundings.
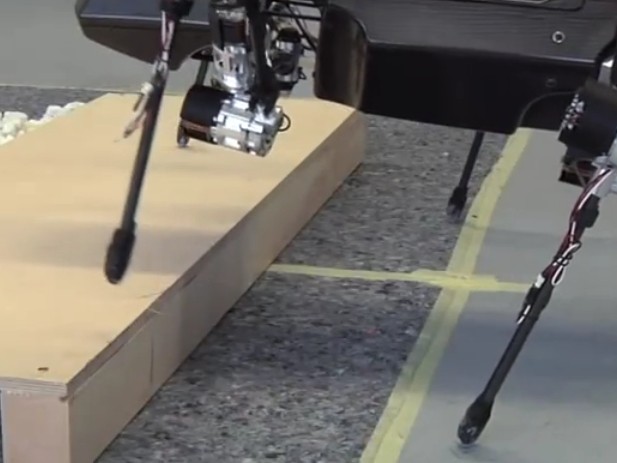
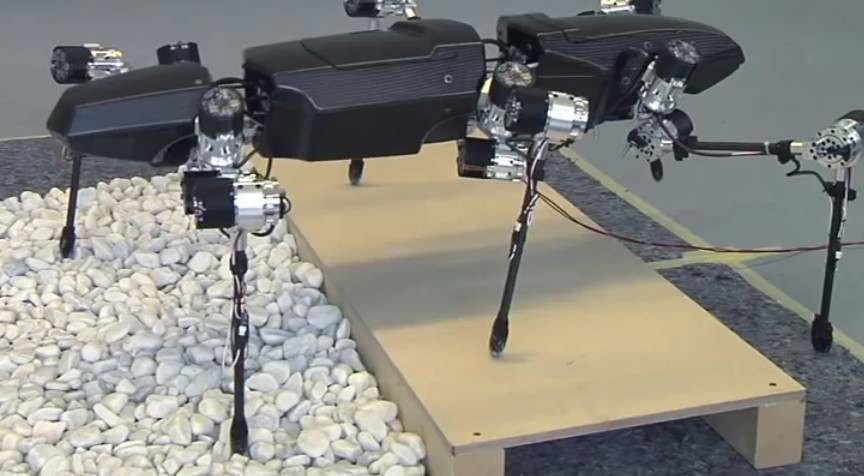
You can see in the video embedded below how it manages to navigate gravel after walking from a smooth surface to the uneven one. It might not seem like a huge breakthrough, but it actually is.
Each leg makes its own decision as to when and where to move, by using integrated sensors. This “active posture adaptation” shows how to surmount basic obstacles like wooden platforms.
True, a remote operator could guide it through it, but the point was to make the Hector at least mildly self-sufficient in this particular task.
No small task for something with 18 passive electric joints (which mimic how muscles act) and a myriad of sensors and short-range cameras. At least the exoskeleton is pretty light, made of carbon-fiber-reinforced plastic (CFRP).
The stages of development
The motion of real stick insects was studied by the inventors, as well as the nervous system. The information was critical in creating the electric joints and enabling them to behave like the biological systems.
After that came a virtual prototype, which was employed for preliminary tests. This was a way to reduce damage risk to the actual robot, which eventually starred in the video you see down below. It's a bit shaky, the way Hector walks, but for an early design that is years away from completion, it's not that bad at all.