14 DAY TRIAL //
14 DAY TRIAL // Biologists and engineers at the University of California in Berkeley (UCB) say that designing jumping robots becomes entirely possible if robotics experts take inspiration from leaping lizards in designing their innovative machine. The video below provides a clear example of how this can be achieved.
A tail appears to be everything that robots need in order to be able to jump like a lizard. The thing that designers were unable to get robots to do until now was to stop pitching head-over-heels after jumping from a ramp. This is a common flaw in design, which the UCB team sought to address in this study.
In order to do that, they setup a series of experiments using slow-motion cameras, in which they had lizards carry out various types of jumps. For example, the creatures had to jump atop an obstacle from a box that was either slippery, or provided sufficient grip.
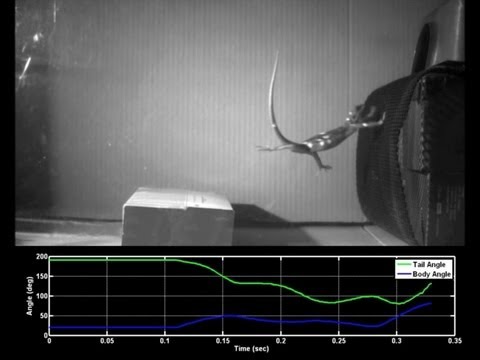
Investigators were especially interested in how the animals were able to leap even from unsure footings, and still manage to reach their targets. Upon reviewing the slow-motion footage, the team calculated the angles at which the lizards jumped, and studied how their Tails influenced their paths.
After this was done, UCB researchers used a robot called Tailbot to try and replicate the lizards' performances. They soon learned that having a tail and throwing it up in the air was insufficient to prevent pitching.
What the team discovered was that the angle of the tail had to be continuously adapted through a dedicated feedback mechanism. In other words, the angle corrections had to be done in real-time.
“We showed for the first time that lizards swing their tail up or down to counteract the rotation of their body, keeping them stable,” says the leader of the team, integrative biology professor Robert J. Full.
“Inspiration from lizard tails will likely lead to far more agile search-and-rescue robots, as well as ones having greater capability to more rapidly detect chemical, biological or nuclear hazards,” he explains.
The expert says that even agile dinosaurs such as the Velociraptor must have used their long tails actively during walking and running. Without it, they would have most likely pitched forward, and come to an undignified halt on their faces.
“Muscles willing, the dinosaur could be even more effective with a swing of its tail in controlling body attitude than the lizards,” Full explains.
“This paper shows that research-based teaching leads to better learning and simultaneously can lead to cutting-edge research. It also shows the competitive advantage of interdisciplinary approaches and how involvement of undergraduates in research can lead to innovation,” he concludes.